
Daniel Berio, Guillaume Clivaz, Michael Stroh, Oliver Deussen, Sylvain Calinon, Réjean Plamondon, Frederic Fol Leymarie
Image-Driven Robot Drawing with Rapid Lognormal Movements
Intl Symp.on Robot and Human Interactive Communication (Ro-Man)
download pdf | download bibtex entry

Abstract
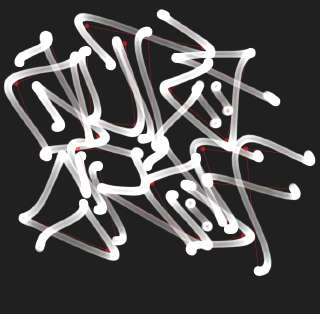
The democratization of cobots makes them accessible for physically producing paintings and drawings in collaboration with artists. At the same time, large deep-learning models are becoming increasingly common tools for a variety of complex image generation tasks. We present a method that combines these two advancements by enabling gradient-based optimization of natural human-like motions guided by cost functions defined in image space. To this end, we use the sigma-lognormal model of human hand/arm movements with an adaptation that enables its use in conjunction with a differentiable vector graphics (DiffVG) renderer. We demonstrate how this pipeline can be used to generate feasible trajectories for a robot by combining image-driven objectives with a minimum-time smoothing criterion. We demonstrate applications with generation and robotic reproduction of synthetic graffiti as well as image abstraction.
Bibtex key