































































Computational Sense and Physical Movement
This project is a performative piece which exhibits a real-time drawing as a process of a man counterbalancing a computer motions. The Project experiments with different computational sensors and analyse how the sensors can impose different physical movement accordingly.
produced by: Freddie Hong
Above video shows the sucessful attemtps of each 'Act'. There were three attemtps per each different 'Act'
Video
For the recording of the performance, there was one camera below the screen recording my movement and at the sametime the screen was being recorded by TinyTake.
Video is kept as unedited as possible to show the very ture and clear process from beginning to the end of each ‘Act’
Method
Intention of this project is to create a dialogue between physical and a virtual and contains my obsession to establish the narrow and peculiar state that sits in between. I am interested in knowing the ‘other-ways’ of designing and this project is a documented demonstration of it.
The project does so through introducing a method which the user wears a custom designed Iphone harness to interact with the program, this way the user’s interaction is not limited to the hands and instead the entire body is used.
The project includes 5 different computational sense and Acts. For each individual ‘Act’ a user is expected to utilise their own body to counterbalance with the ‘ongoing drawing’ on screen, caused by the user himself and a computer. The aim is to sustain the system until its reaches the ending point at which point it will store the final result of the ‘ongoing drawing’ as the end product.
Therefore, a man himself become a drawing machine, character of the sensor becomes an instruction and the final drawing produced can be analysed as an choreographic score.
All 5 acts are based on gyrOsc except from the act #4 which uses webcam as an additional input. Act #1, Act #2 use gyroscope as a sensor, Act #3 uses accelerometer, Act #4 uses button and computer vision and Act #5 use gravity. Each individual Acts also includes different computer behaviours, such as sine wave, binary wave, sink, linear motions, and gravity. These pre-written behaviours are apparent from the user’s movement.
For Act #1 and Act #2 the user has to try to keep the ‘moving agents’ and their trail as close to the centre line as possible.
For Act #3 the user has to accelerate himself to stop the ball dropping outside the screen. It is safe to keep the agents above the horizontal line as the agents speeds up in accordant their Y position.
For Act #4 the moving agents is trying to escape the screen and the user has to move in opposing direction to keep them within the screen.
For Act #5 the user has to counterbalance himself as the movements of the agent are caused by the user’s own posture.
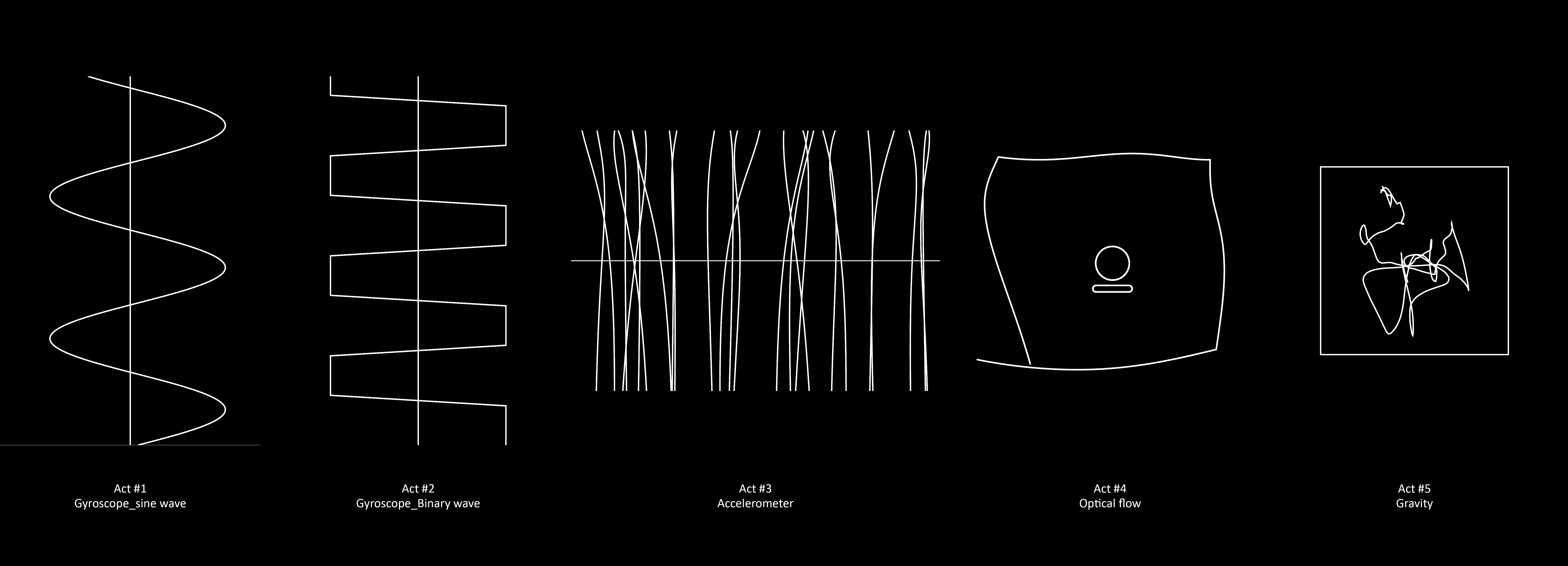

The program consists of 5 different Act that all deals with different computed movement and sensors.
Program
Program begins with ofMesh primitive_points that as travels create a trail behind. For the interaction the size of the balls are set to its maximum (gl.pointSize50.0), this way the user can better observe the position of the ball in relation to the screen.
Three agents are each given different perlin values, to slightly offset each other, this was a controlled ‘give-away’ to the system to produce more vibrant drawings in controlled environment. Once the user fails or success and the program reaches its end, the trail of lines are saved as a PDF.
Advantages of using PDF is that the drawing is saved as a vector format that later can be communicated with various CNC machines a very basic form of engineering cybernetics. This communication is vital as it converts my body language into computational language.
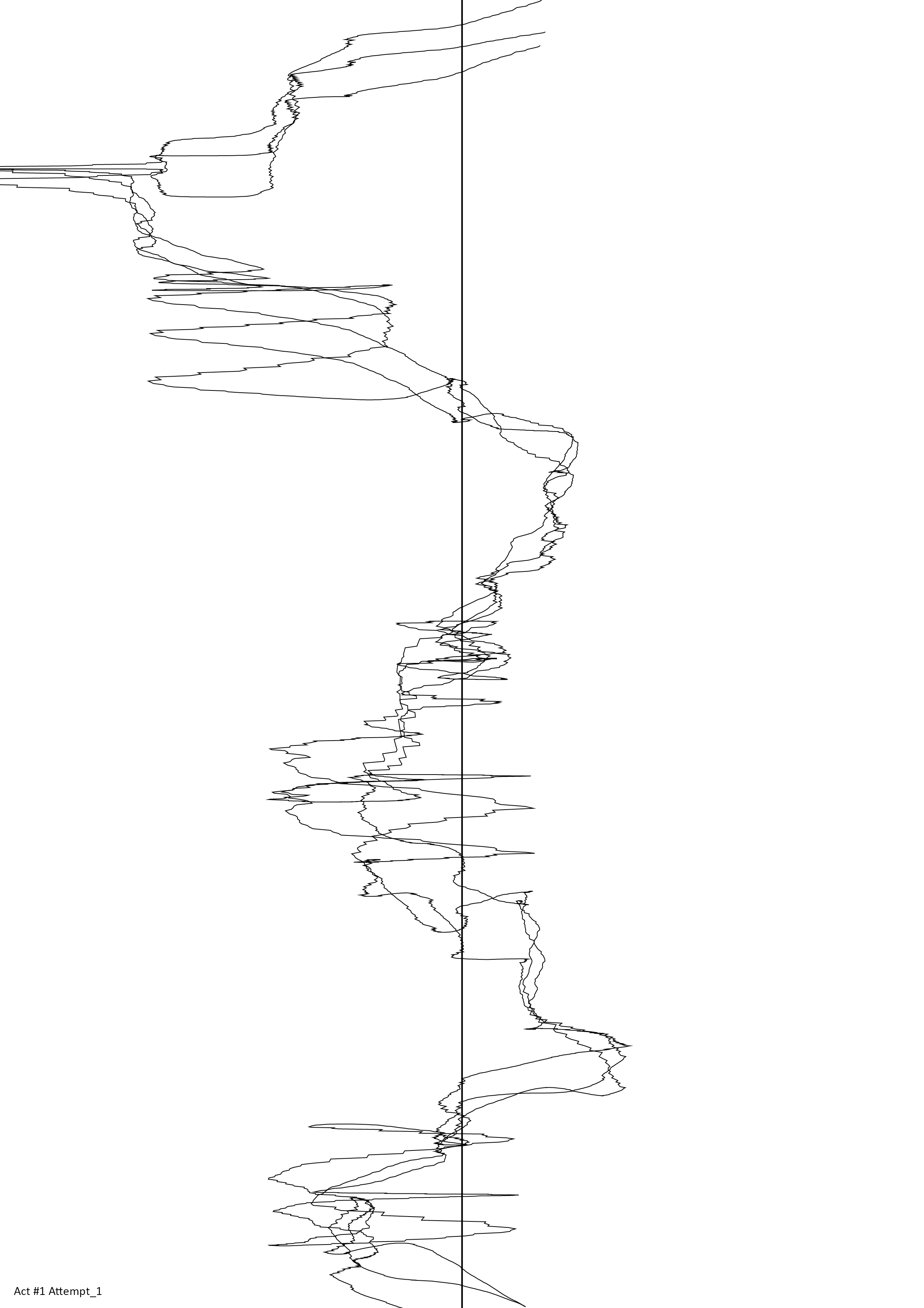

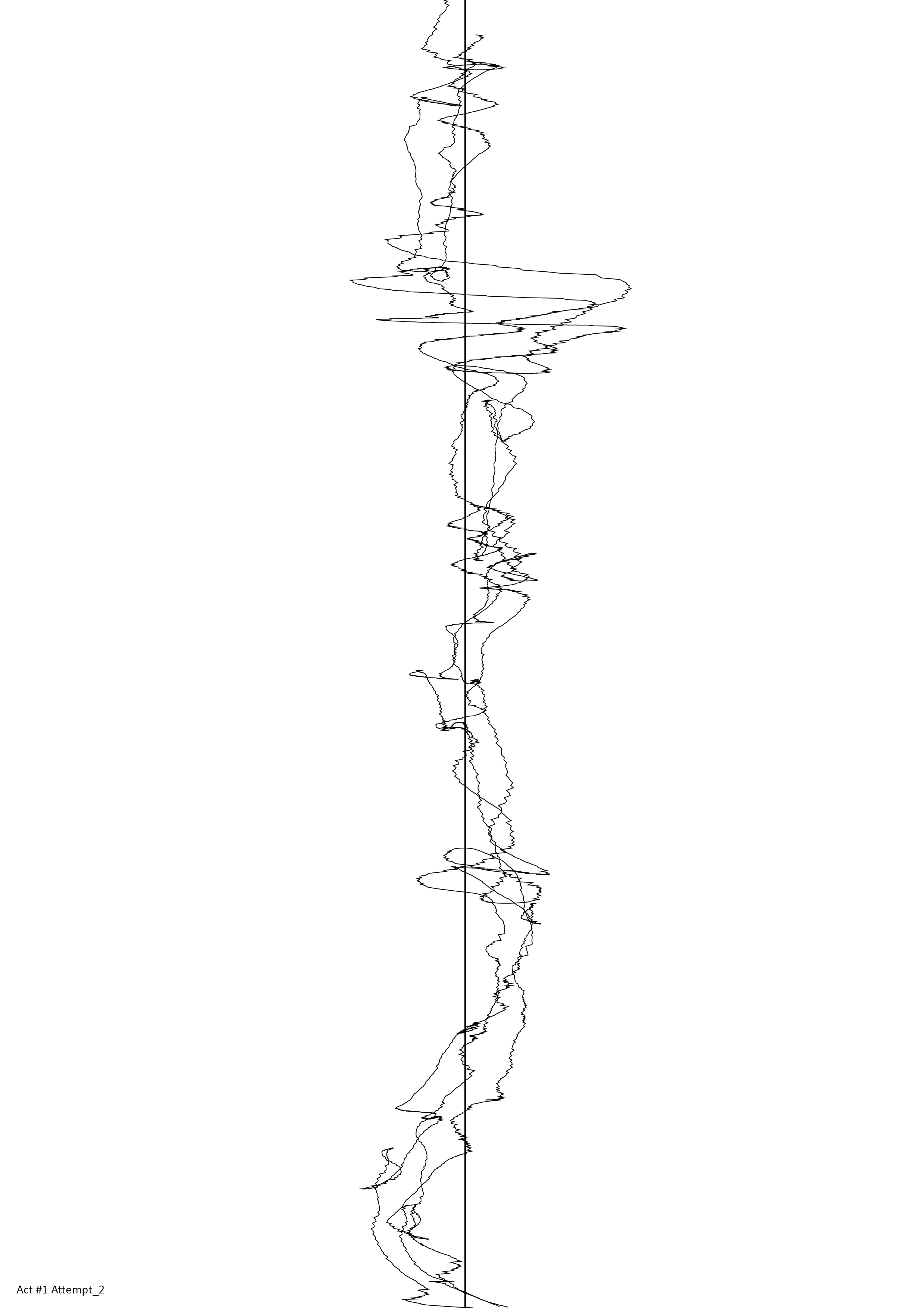
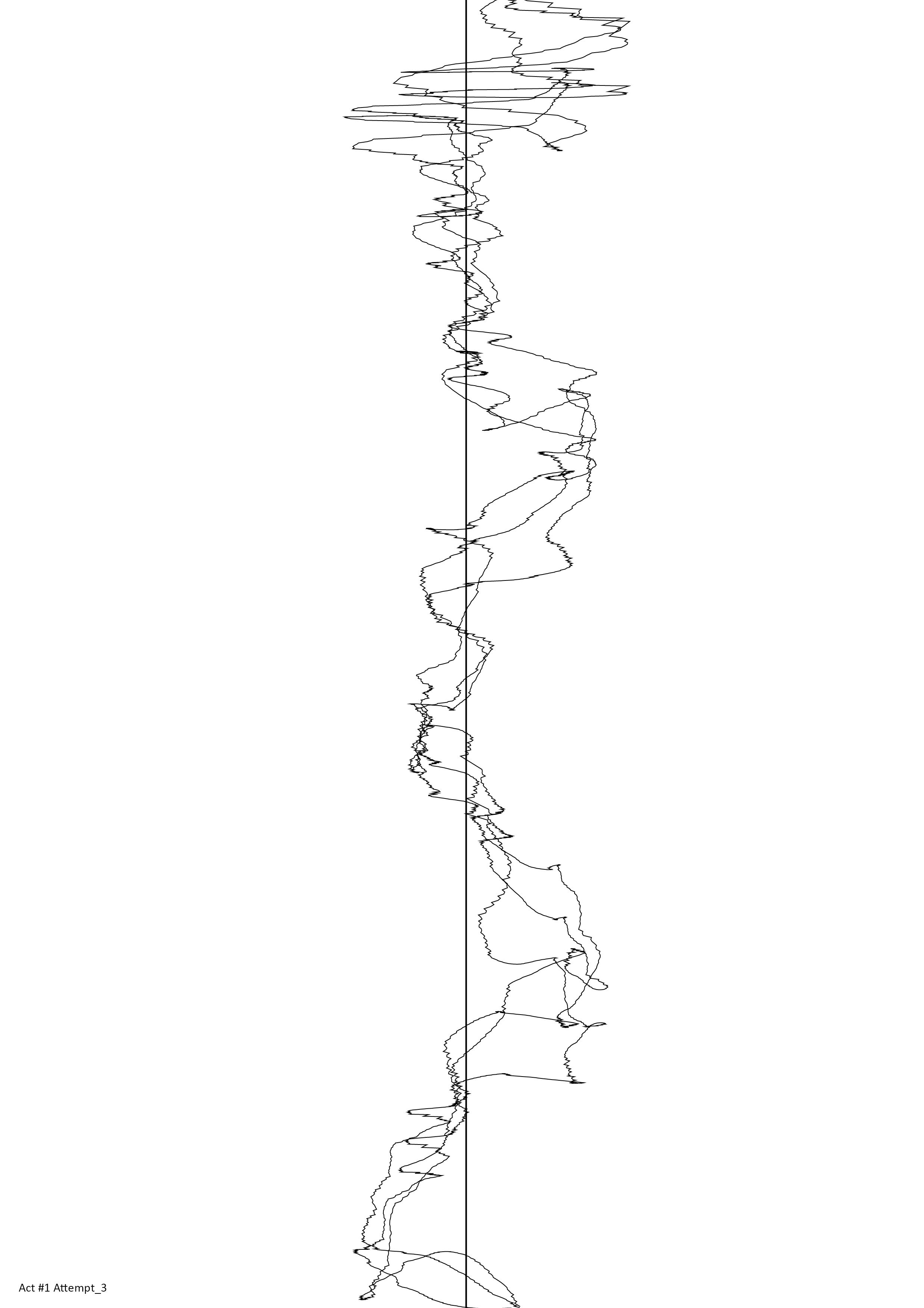
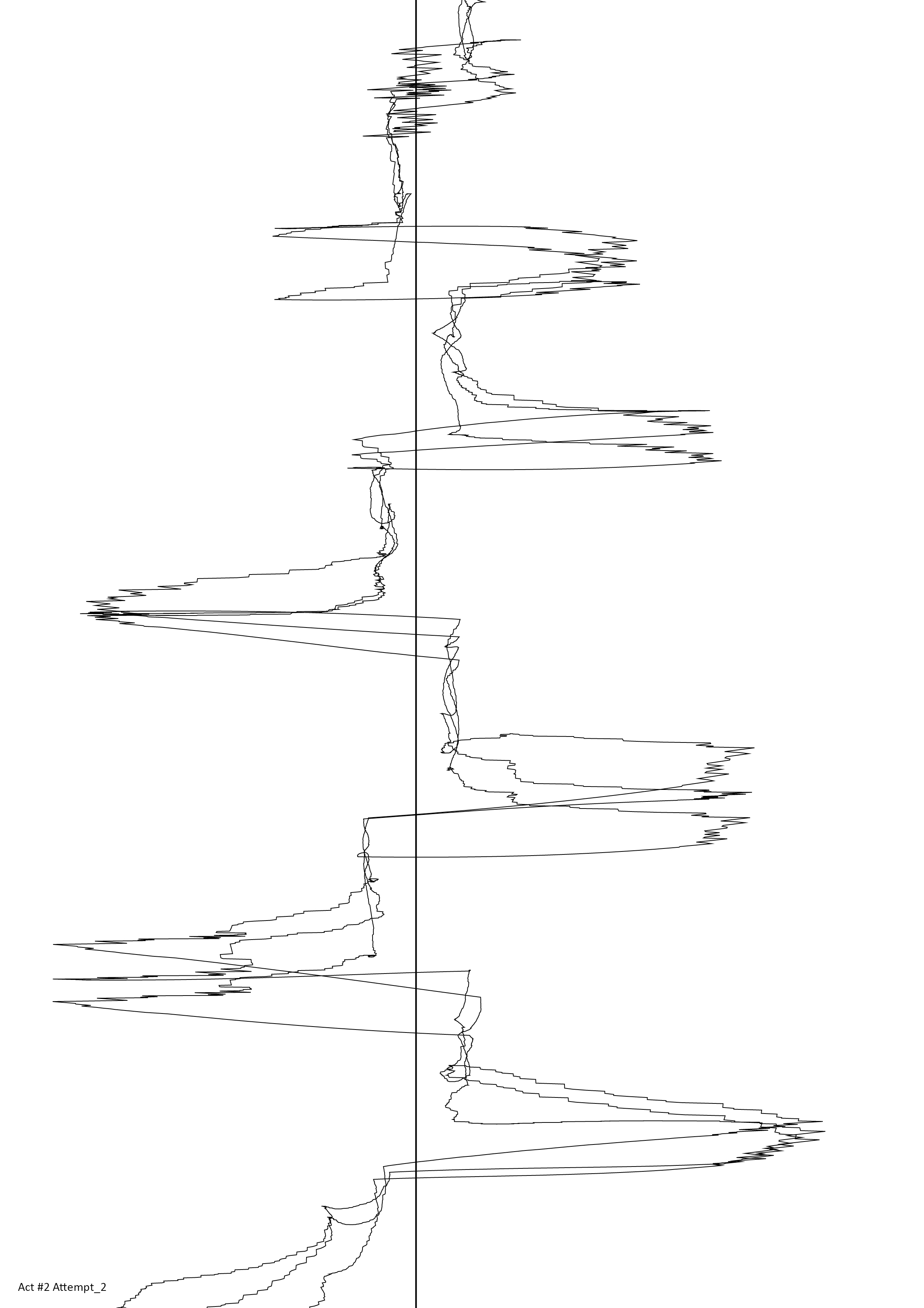
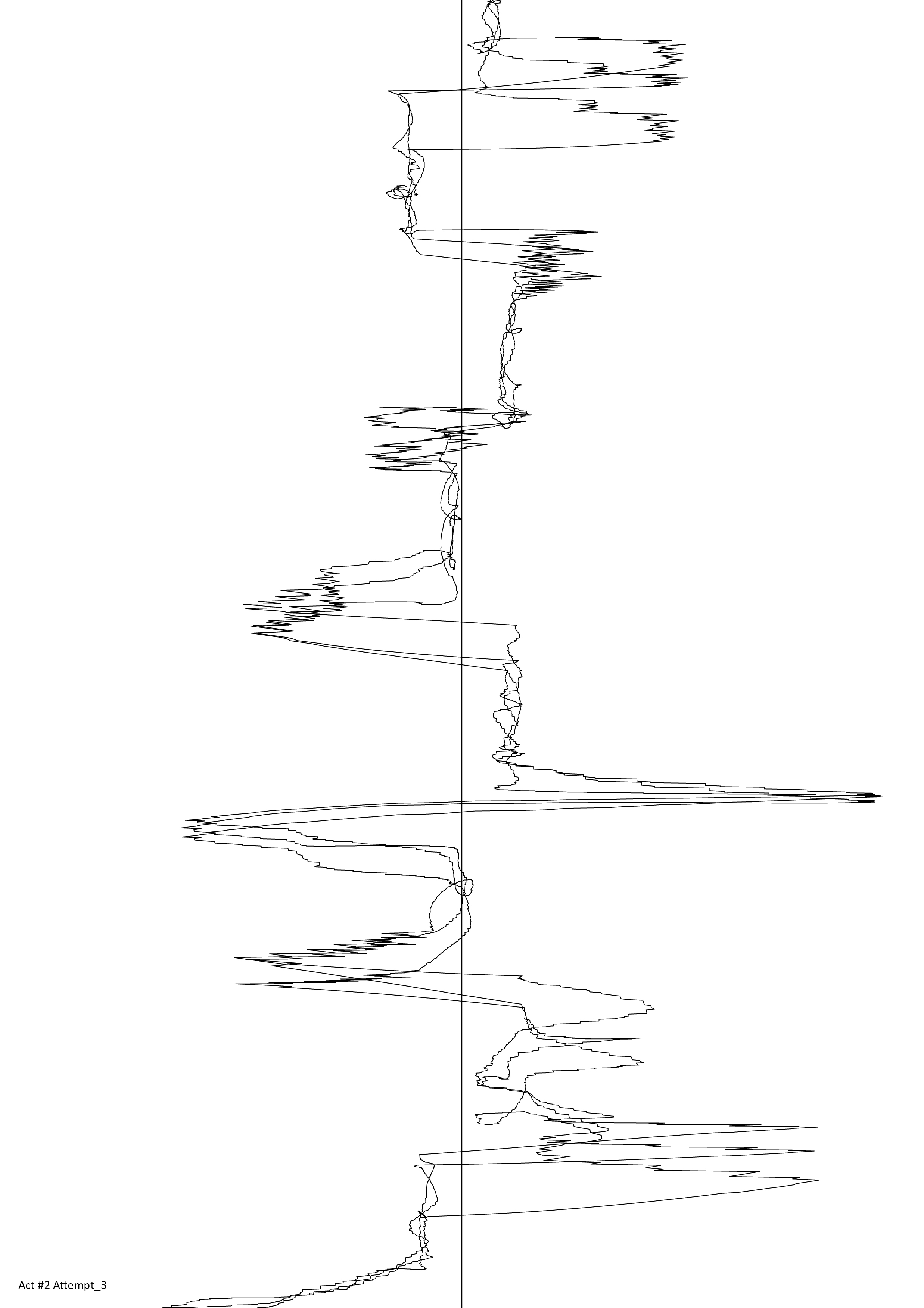
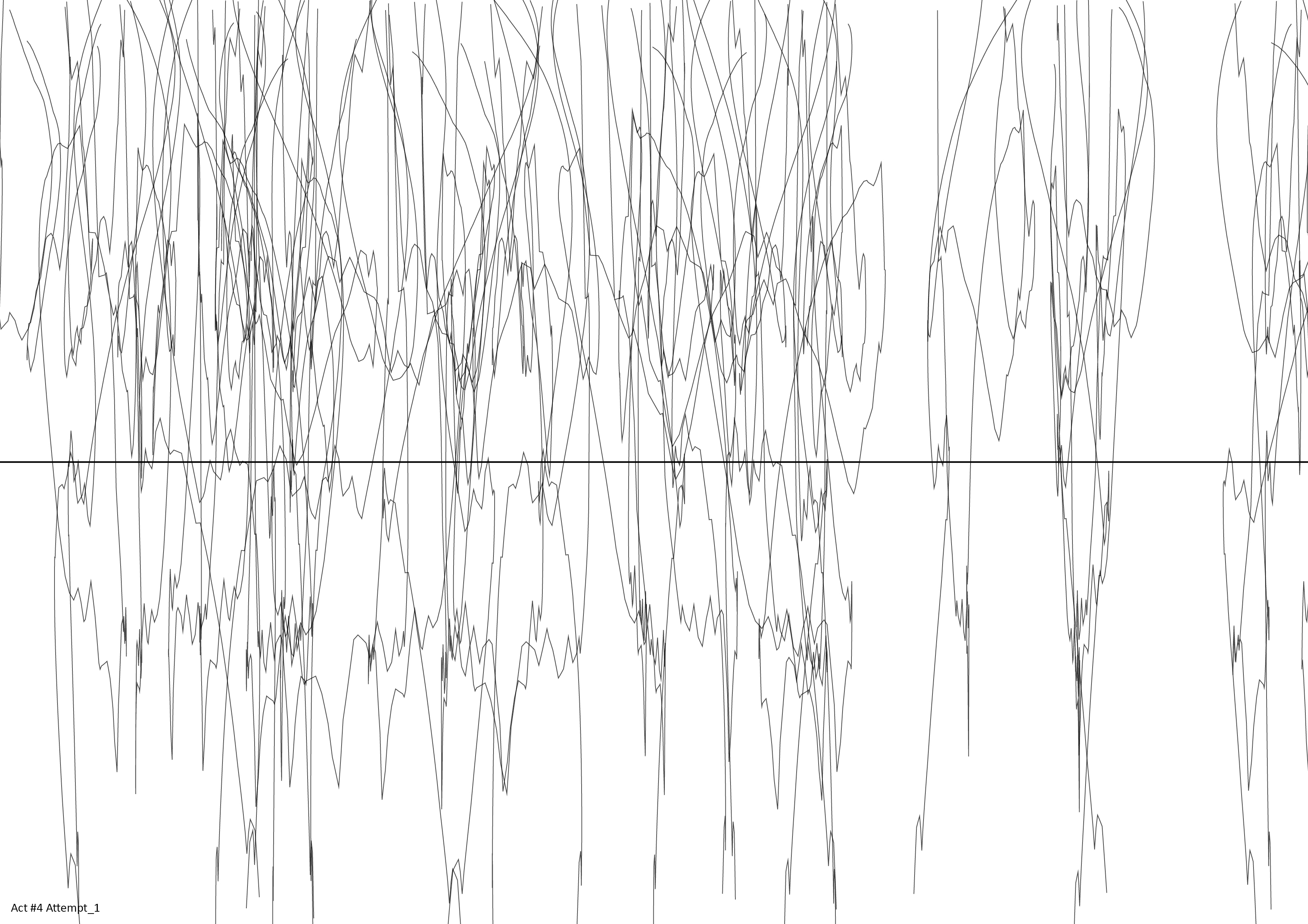
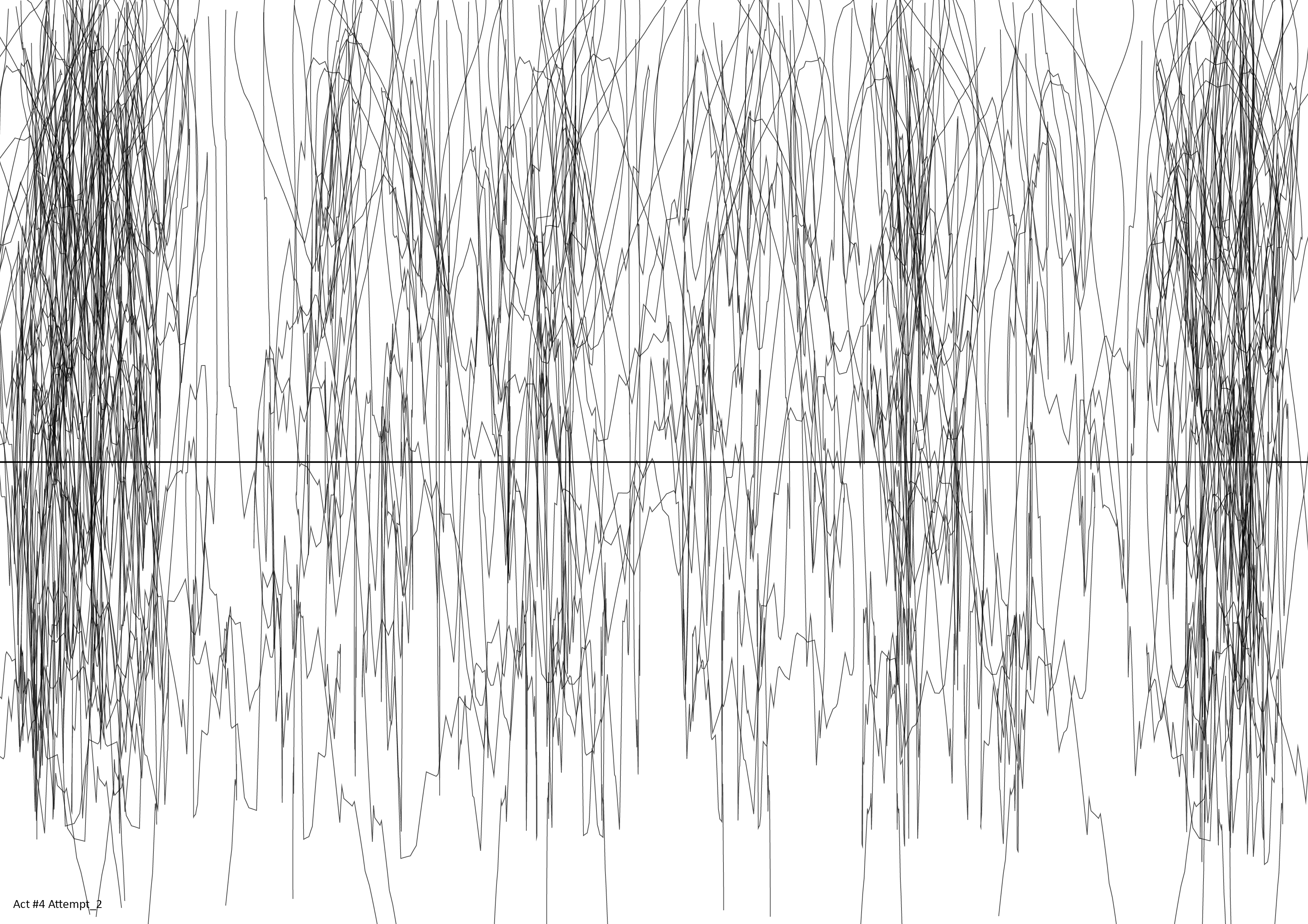



Drawing
As mentioned above, the project takes the advantage of the vector images, and demonstrates the conversion of my physical movement into computational language by introducing ‘vertical plotter’ to physically draw the final outcomes of each ‘Act’.
Importance of using vertical plotter is on demonstration of this conversion not on the mechanisms of the plotter itself.
Act #5 is a three dimensional piece is printed with SLS 3d printer in addition to the drawing.
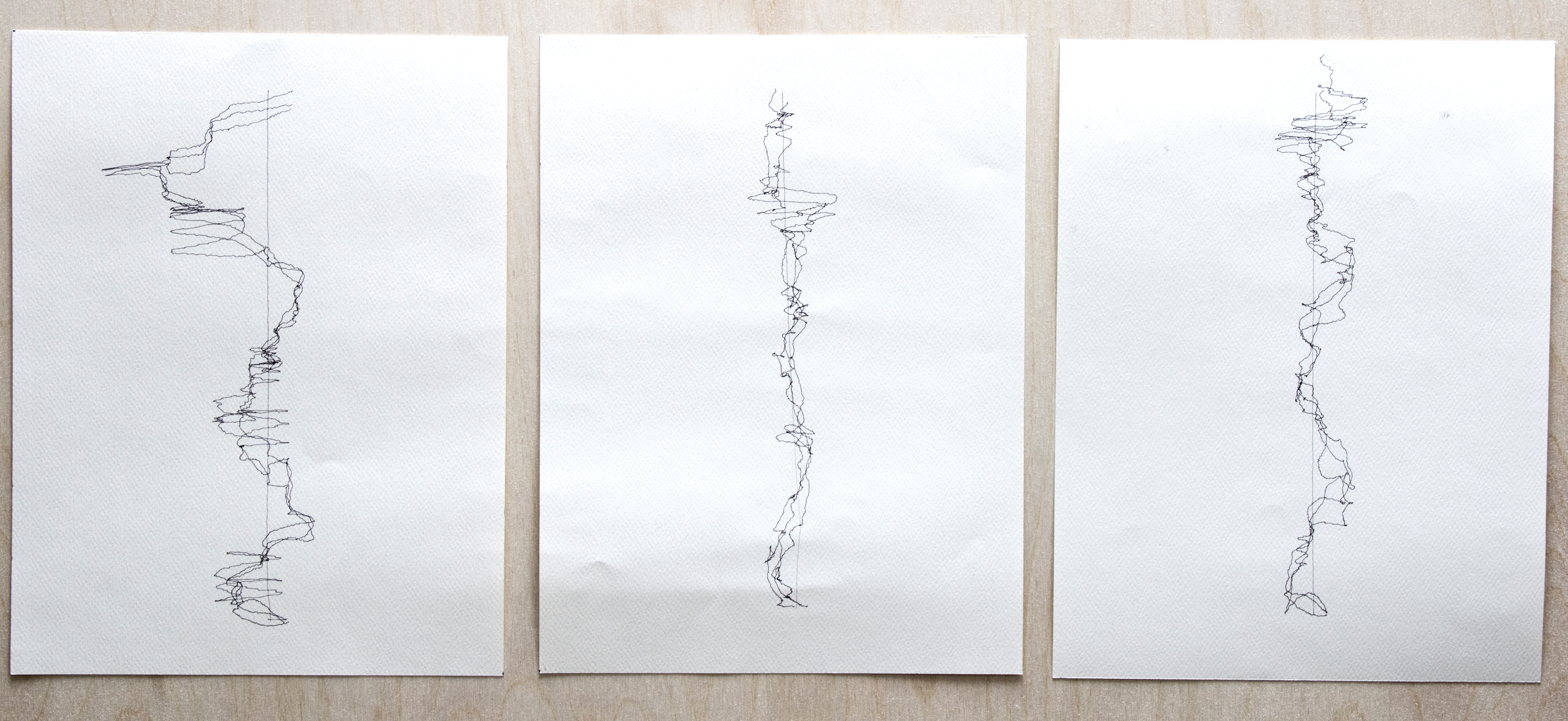

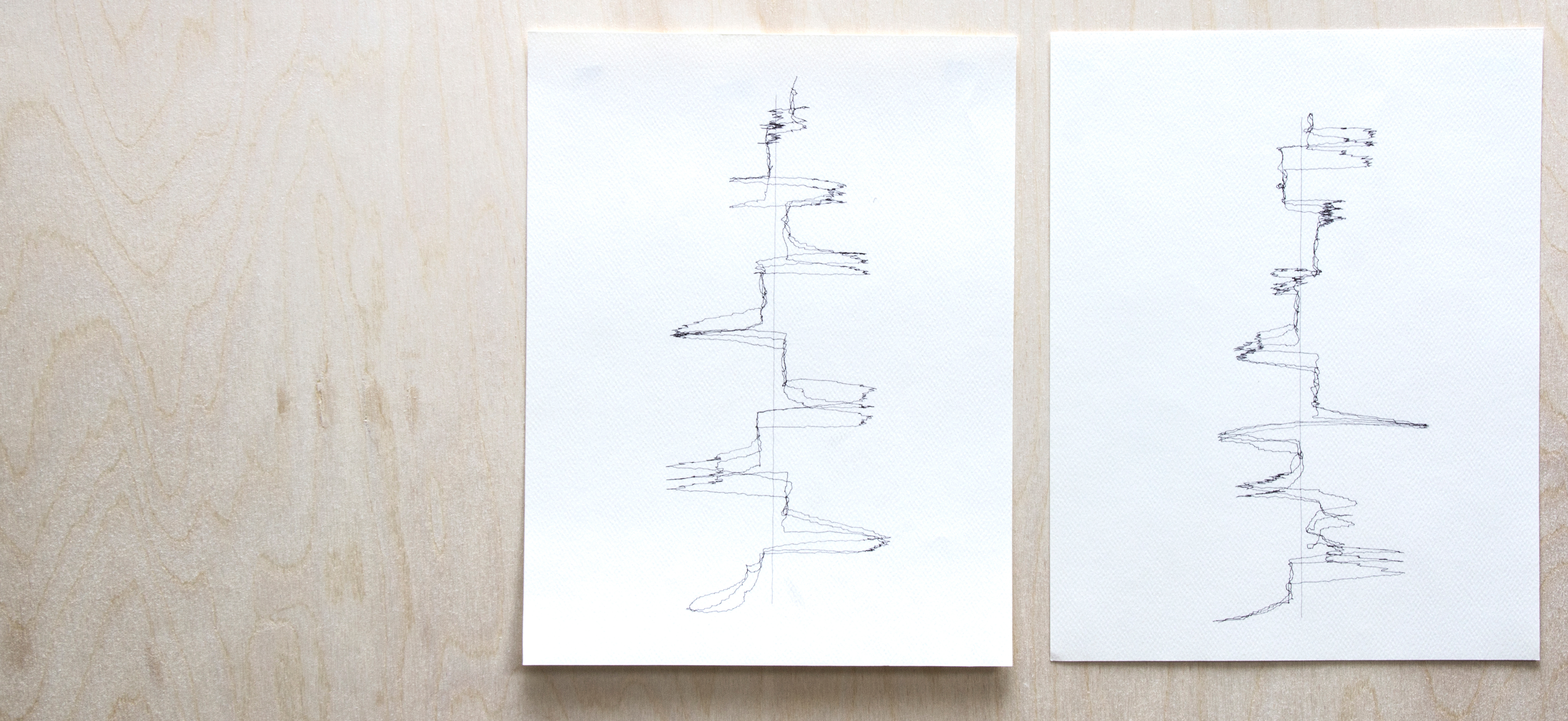
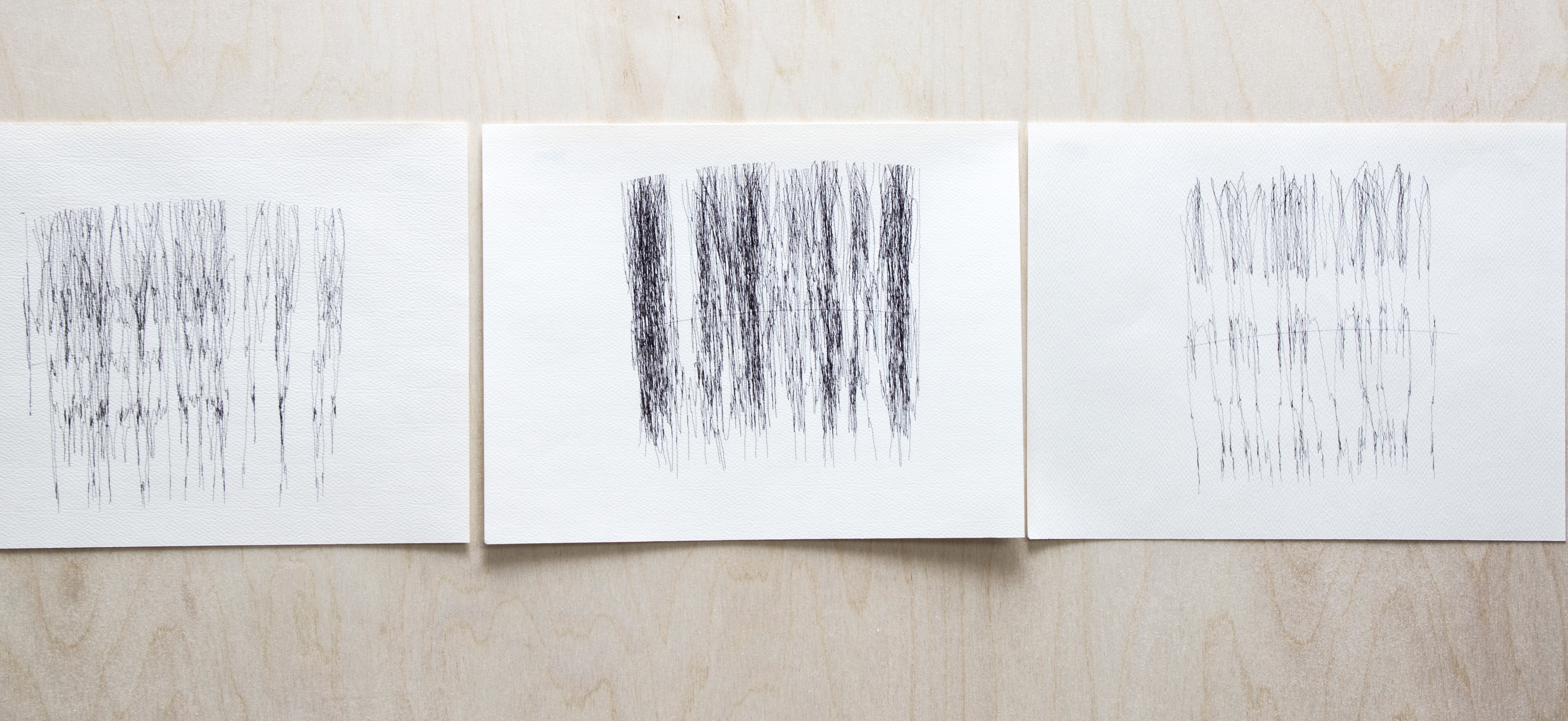
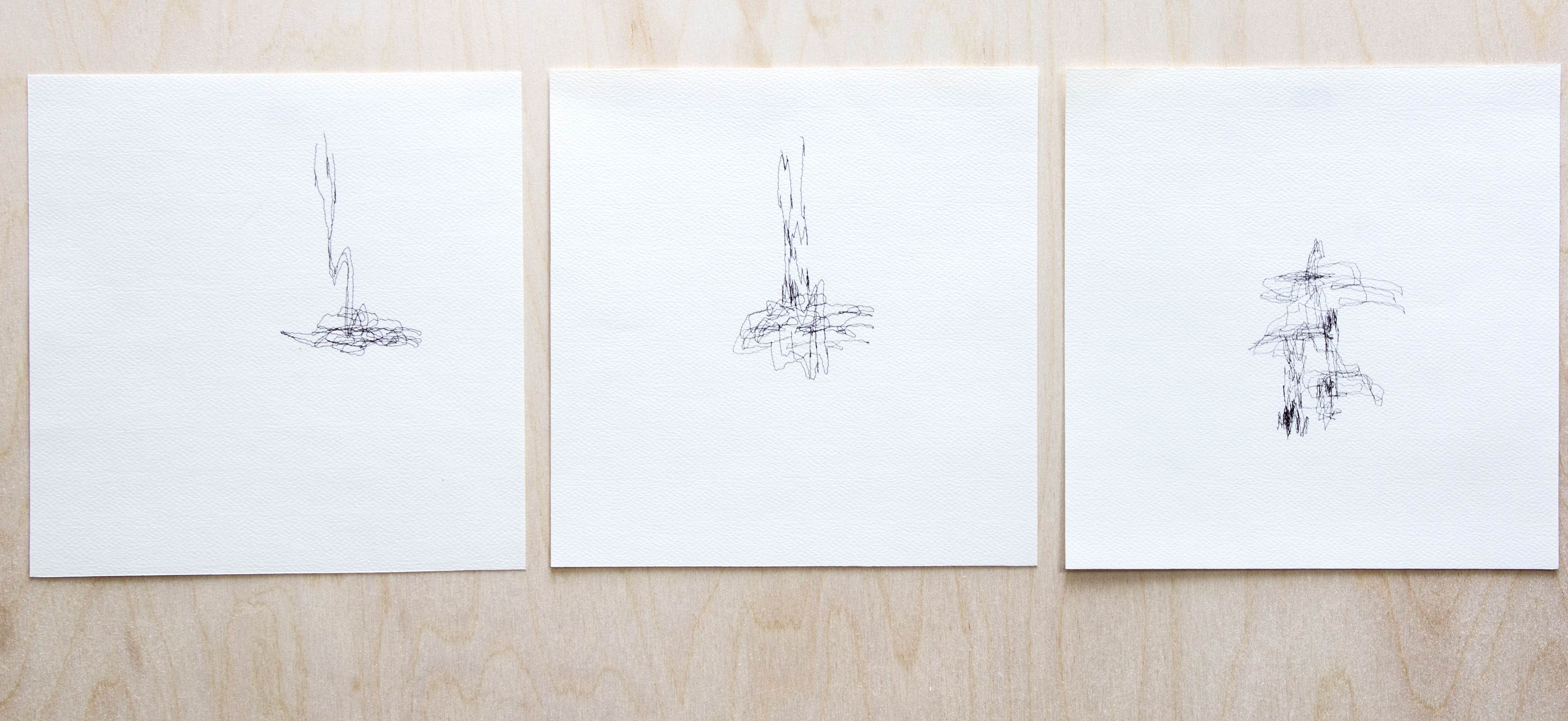
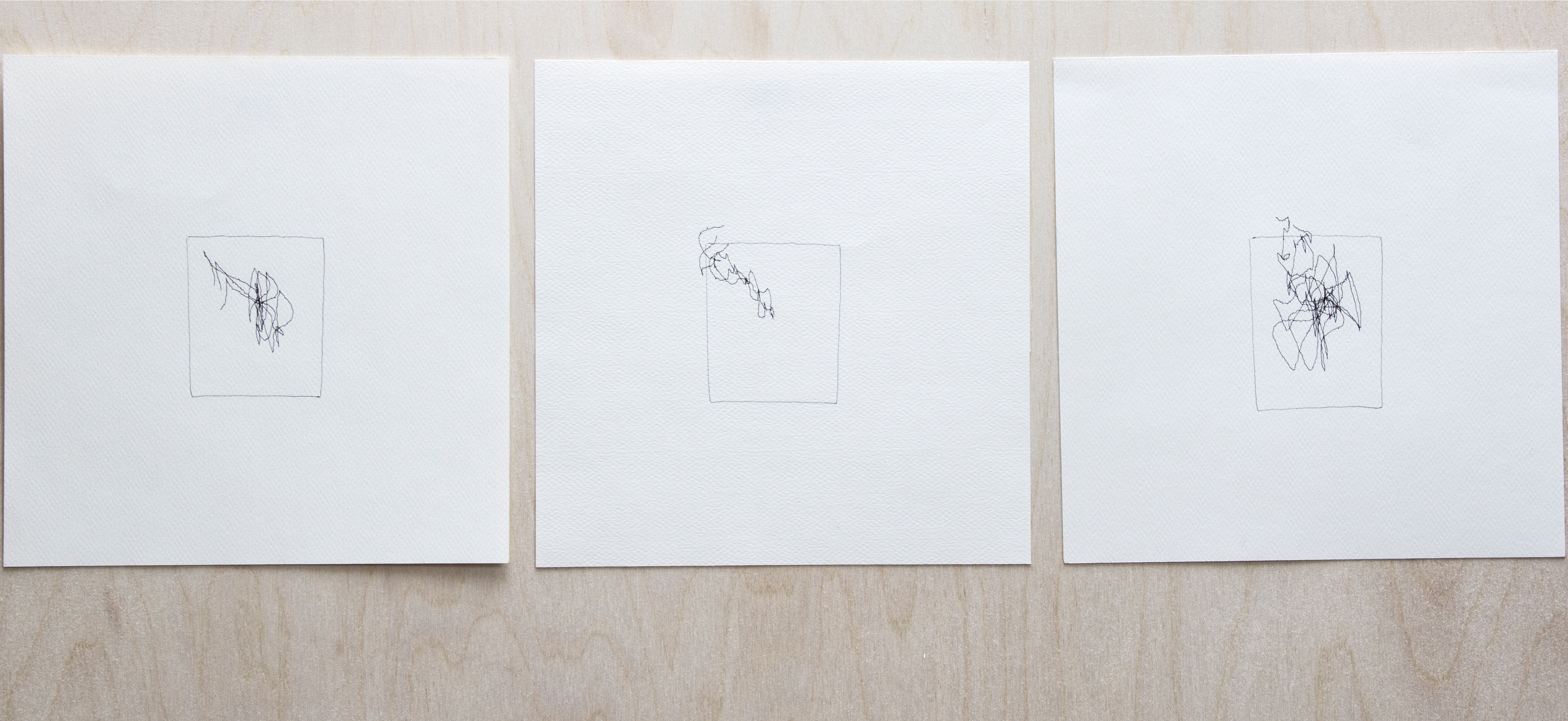
Physcial drawings of the 5 different 'Act' and attempts
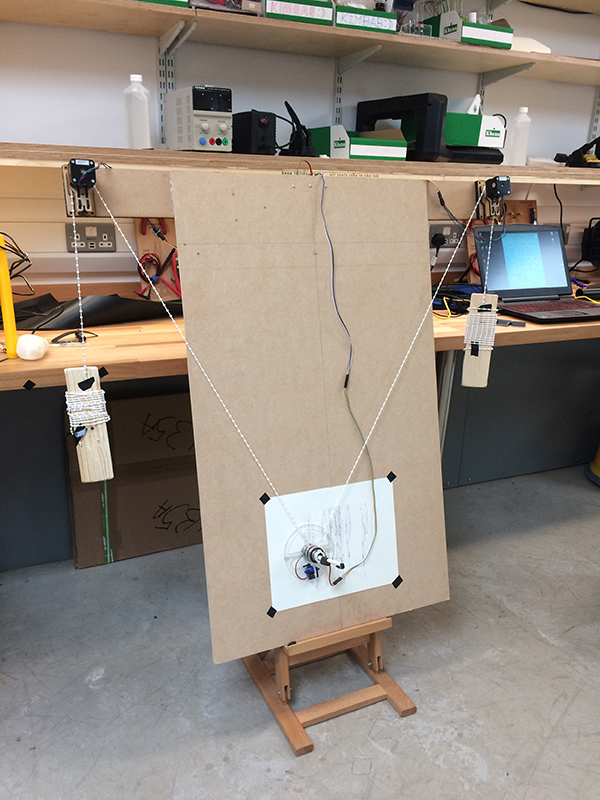

Polargraph Vertical Plotter developed by Sandy
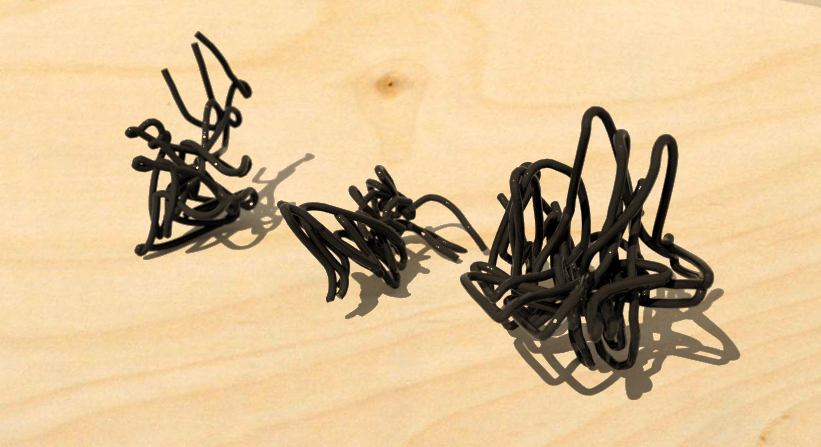

SLS printed 3D Artefacts of the Act #5
Add-on
The program include ofxOsc, ofxMaxim and ofxOpenCv. Osc is used for every Acts and openCv is only used for Act #4.
Further Development
Possible further development will include multiple users interacting with pavilion or an architectural space, through sensors.
Reference
Oscar Schlemmer
Rebecca Horn
Polargraph (vertical plotter) - http://www.polargraph.co.uk/